


JASA: Localization of moving acoustic sources in a water-filled tank.
February 10, 2019 Antonin Novak
research research_acoustics research_bioacoustics A. Novak, P. Cisar, M. Bruneau, P. Lotton & L. Simon (2019), "Localization of sound-producing fish in a water-filled tank", J. Acoust. Soc. Am.. Vol. 146(6), pp. 4842-4850.
In the framework of an international collaboration between the Laboratoire d'Acoustique de l'Université du Mans (LAUM), France and the Institute of complex systems (ICS) of University of South Bohemia in Ceske Budejovice, Czech Republic, we have been working on a localization algorithm that is able to localize moving acoustic sources (sound-producing fish) in a water-filled tank with few (four) hydrophones.
This kind of algorithm can help to answer questions that biologists ask when studying fish behavior. Indeed, if we can associate the sound event to a given place in the tank, and consequently to a given fish (providing the video recording), the biologists can now which of the fish produced the sound and in during which behavioral context.
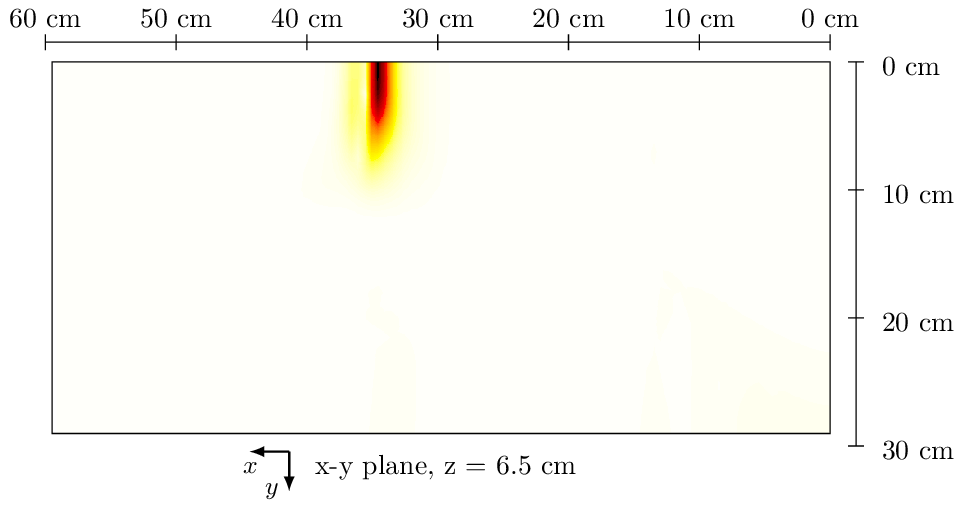
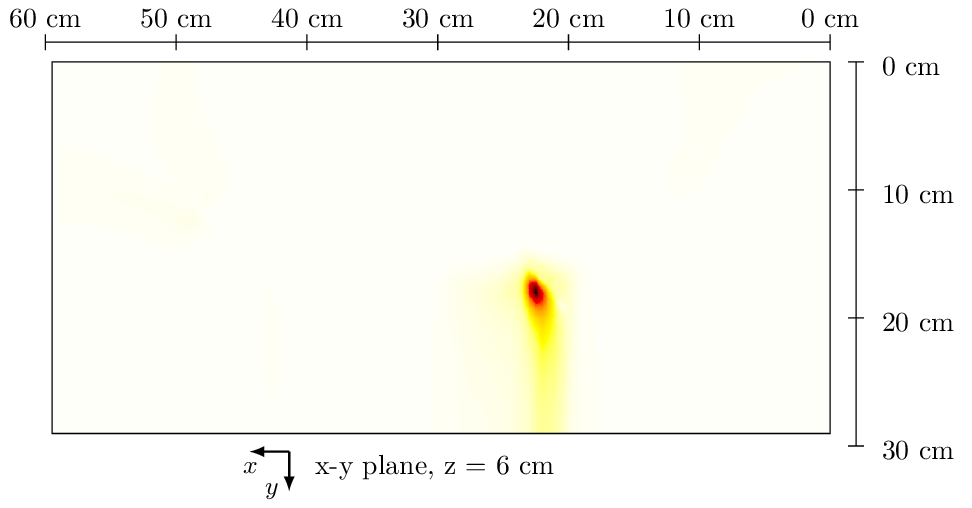
Below, you find three short videos of croaking gourami (Trichopsis pumila) recorded at the moment of their sound production together with the probability maps of the source position obtained from the hydrophone recordings and localization algorithms. An image-based localization system that uses Kinect system, developed by ICS, has been used as a reference to provide exact position of each fish.
A research paper describing the localization algorithm has been published at The Journal of the Acoustical Society of America.
| Event 1: | TCR 16:16:12:25 |
| Acoustic localization: | x = 35.0 cm, y = 5.5 cm, z = 6.5 cm |
| Kinect (visual) localization: | x = 34.9 cm, y = 6.6 cm, z = 2.5 cm |
|
| Event 2: | TCR 16:36:26:19 |
| Acoustic localization: | x = 52.5 cm, y = 18.5 cm, z = 9.0 cm |
| Kinect (visual) localization: | x = 53.9 cm, y = 19.5 cm, z = 2.8 cm |

|
| Event 3: | TCR 19:59:09:07 |
| Acoustic localization: | x = 22.5 cm, y = 18.0 cm, z = 6.0 cm |
| Kinect (visual) localization: | x = 20.5 cm, y = 18.6 cm, z = 2.7 cm |
|
In this paper, the authors introduce an algorithm for locating sound-producing fish in a small rectangular tank that can be used, e.g., in behavioral bioacoustical studies to determine which fish in a group is sound-producing. The technique consists of locating a single sound source in the tank using signals gathered by four hydrophones placed in the tank together with a group of fish under study. The localization algorithm used in this paper is based on a ratio of two spectra ratios: the spectra ratio between the sound pressure measured by hydrophones at two locations and the spectra ratio between the theoretical Green’s functions at the same locations. The results are compared to a localization based on image processing technique and with video recordings acquired synchronously with the acoustic recordings.
@article{Novak2019fish,
author={Novak, Antonin and Cisar, Petr and Bruneau, Michel and Lotton, Pierrick and Simon, Laurent},
title={Localization of sound-producing fish in a water-filled tank},
journal={J. Acoust. Soc. Am.},
volume={146},
number={6},
doi={10.1121/1.5138607},
url={https://doi.org/10.1121/1.5138607},
pages={4842-4850},
year={2019},
publisher={Acoustical Society of America}
}